Be it Internet or hard copy, an import owner occasionally finds a diagnostic nugget in an old Diagnostic Solutions column that covers his specific vehicle problem. About mid-summer, the owner of a brand-new 2019 Subaru Ascent came upon my December, 2015 ImportCar column describing the basic operation of electric power steering (EPS) systems. Knowing that the source of his steering complaint could be his Subaru’s electric power steering, he contacted me about the steering on his new Ascent feeling “terribly light and really twitchy.”
Like most working technicians, I have to do my homework before I can comment on any topic and that takes a little time. While I was crafting my response to his initial inquiry, the Subaru owner rightfully contacted his Subaru sales person, who suggested turning off the Ascent’s “Lane Keep Assist” feature.
According to the salesperson, the Lane Keep Assist was reacting to the Ascent leaving the center of the driving lane. By applying some basic operating logic (see the August, 2018 Diagnostic Solutions), I speculated that leaving the center of the driving lane evidently causes the Lane Keep Assist feature to make a steering correction by momentarily assuming control of the electric power steering.
This momentary steering correction was evidently causing the Ascent’s “terribly light and really twitchy” steering problem. In any case, turning off the Lane Keep Assist solved the Subaru’s steering problem. In my response, I could only agree with the salesperson’s suggestion because it followed what I believe to be the internal logic of the Lane Keep Assist feature.

WHERE TO BEGIN
The upshot of this incident is that we’re likely going to see many similar EPS-related steering complaints in our service bays. Most problems will be simple, like turning off a switch or cleaning the windshield to allow the windshield cameras a clear view of the roadway. But, we’ll also see problems that require a basic understanding of how Advanced Driver Assist Systems (ADAS) might use the electric power steering system as a basic data input for both normal and emergency driving situations.
EPS AND VSC BASICS
Going back to the December, 2015 ImportCar column I wrote about electric power steering (EPS) systems, I looked upon EPS at that time as solely an electronic replacement for conventional hydraulic power steering. In brief, EPS contains a steering wheel position sensor and a steering input torque sensor. The data from these two sensors report to an EPS module, which translates the steering input torque into an appropriate level of steering assist via a pulse-modulated, bi-directional electric motor that’s connected to the steer gear input shaft or integrated into the steering rack assembly. The steering position sensor should read “zero” when the vehicle is traveling straight ahead.

But, times have changed because the steering wheel position and torque sensors began networking with the newly introduced vehicle stability control (VSC) systems. Using EPS data, the VSC module can detect jerky or uncharacteristic movements in the steering wheel torque and position sensors.
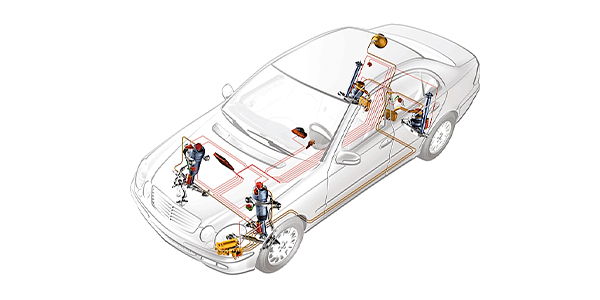
When combined with sudden changes in vehicle direction via a yaw detection sensor mounted in the passenger compartment, the VSC can determine when the vehicle is experiencing an emergency-driving situation. The VSC corrects the vehicle’s direction by applying one or more service brakes via commands sent to the vehicle’s anti-lock braking system (ABS). With this networking concept fully in mind, what we now know as Advanced Driver Assist Systems (ADAS) began taking shape.
DIAGNOSING THE CENTER
Returning to the steering problem in our brand-new 2019 Subaru Ascent, I want to make it clear that, in August, 2018, I didn’t have any better working knowledge of the Ascent’s ADAS network than would anybody other than a trained Subaru technician.
But, looking at ADAS from a diagnostic point of view, let’s allow our imaginations to range far and wide. In one diagnostic scenario, ADAS could be detecting another vehicle wandering into the Subaru’s driving lane via ultrasonic sensors mounted in its fenders. In another diagnostic scenario, ADAS could be tracking the yellow line separating the Subaru’s driving lane from other lanes via cameras mounted inside the windshield. In either scenario, ADAS could be taking control of the Ascent’s electric power steering system to either avoid a collision or correct the path of travel.
In the first scenario of an encroaching vehicle, ADAS might be taking evasive action via the electric steering. In the second scenario, the driver’s steering wheel position sensor input might cause the Ascent to wander from what ADAS “sees” as the center of the driving lane. If that happens, ADAS will command the EPS steering module to “nudge” steering control back to the center of the driving lane, which would explain the “twitching” sensation in the Ascent’s steering wheel. If either of the above hypotheses is close to correct, we’re looking at a new world of wheel alignment diagnostics.
THE “CENTER” INPUT
Back to Basics is a shop-worn term, but it accurately describes the foundational aspects of steering system diagnosis. For example, I was taught many years ago that four wheels are required to steer a vehicle in a straight line. The thrust angles of the drive axles should also align as perfectly as possible with the chassis centerline.
Assuming ideal road and driving conditions, when engine torque is applied to one or both drive axles, the resulting force should propel the Subaru directly along the center of its driving lane with little additional steering input from the driver. The EPS torque sensor should, therefore, be reading “zero” and the EPS steering position sensor should be reading “center.” That “center” input is part of the data being relayed to the various ADAS systems like our Ascent’s Lane Keep Assist.
EPS AND ADAS
I’m speculating that the windshield cameras keep the Ascent in the center of its driving lane by tracking the bright yellow line separating the Ascent’s driving lane from adjacent lanes. If the driver is unaware that the Lane Keep Assist is turned on and if he inadvertently steers toward or away from the yellow line, the Lane Keep Assist will nudge the electronic steering one way or the other until the Ascent is once again traveling along the center of its driving lane. At that point, the EPS should once again indicate “center” steering position and “zero” steering torque.
IN SUMMARY
On the one hand, I’m making some assumptions about how Lane Keep Assist works in conjunction with electric power steering. On the other hand, I’m developing a hypothesis about how the Lane Keep Assist feature could work and how it could possibly fail.
In review, if all four wheels and their thrust centerlines are perfectly aligned with the chassis centerline and the steering position sensor is reading “center” and the steering torque sensor is reading “zero,” the Lane Keep Assist should work perfectly. In other words, when the four wheels and the electric steering gear are aligned to “center,” the Ascent should be traveling straight ahead.
When the steering position sensor deviates from “zero,” a steering quality problem can develop because the Lane Keep Assist isn’t seeing what it really wants to see and wants to make a correction. The Diagnostic Solution in this case isn’t about “fixing the steering,” it’s about finding the center.”
SIDEBAR
Finding the Center: RADAR vs. LIDAR
1. It’s time to quit thinking of EPS solely as “power steering.” Instead, think of EPS as an actuator driven by the combined inputs of global positioning system (GPS), high-frequency sound (Ultrasonic Detection), radio detection and ranging (RADAR), and, perhaps, light imaging detection and ranging (LIDAR) as well.
2. GPS reports the vehicle’s geographic position to ADAS. Given semi-autonomous driving, ADAS then commands the EPS to match the desired GPS position by steering the vehicle along the prescribed driving lane.
3. Ultrasonic detectors, which are usually mounted on fenders, are used to monitor the relative positions of vehicles traveling in adjacent driving lanes.
4. RADAR can’t accurately evaluate the size and disposition of objects. But, providing it’s not obstructed and it’s correctly aligned with the vehicle’s centerline, it can accurately measure the distance between the subject vehicle and far-away objects near the center of the driving lane.
5. Active braking occurs when the forward-looking RADAR detects an object in the driving lane. Active braking then commands the electronic throttle to close and the ABS system to apply the service brakes.
6. Used in semi-autonomous and autonomous driving vehicles, LIDAR is an entirely different object-detection concept that relies upon laser beams to form a three-dimensional, monochromatic image of an object that can be evaluated by an ADAS processor.
7. LIDAR has limited capability in nighttime or cloudy-weather driving. But, LIDAR can also detect the size, shape and exact disposition of any object within its range.
8. LIDAR can, therefore, differentiate between a child and a semi-truck occupying the driving lane.
9. LIDAR, via ADAS, might command the electronic power steering to avoid the child at all costs, but might merely limit, via active braking, the severity of impact with the semi-truck.
10. LIDAR is relatively new and expensive, but with the advent of more autonomous driving capabilities in modern vehicles, it can make life-or-death decisions much faster than the human driver.